
Nvidiaの研究がAIコーディングエージェントによる自己学習ロボットを公開
Nvidiaの研究チームがAIコーディングエージェントを用いて、ロボットが器用な把持タスクを自己学習する技…
AI&Tech、もう追いかけなくていい。
30秒で読めるニュースダイジェスト
Nvidiaの研究チームがAIコーディングエージェントを用いて、ロボットが器用な把持タスクを自己学習する技…

Hugging Faceがロボット制御フレームワーク「LeRobot」とエージェントフレームワーク「Strands Agents」を…

フランスのスタートアップGenesis AIが、人間型ではない新しいロボット「Eno」を発表しました。
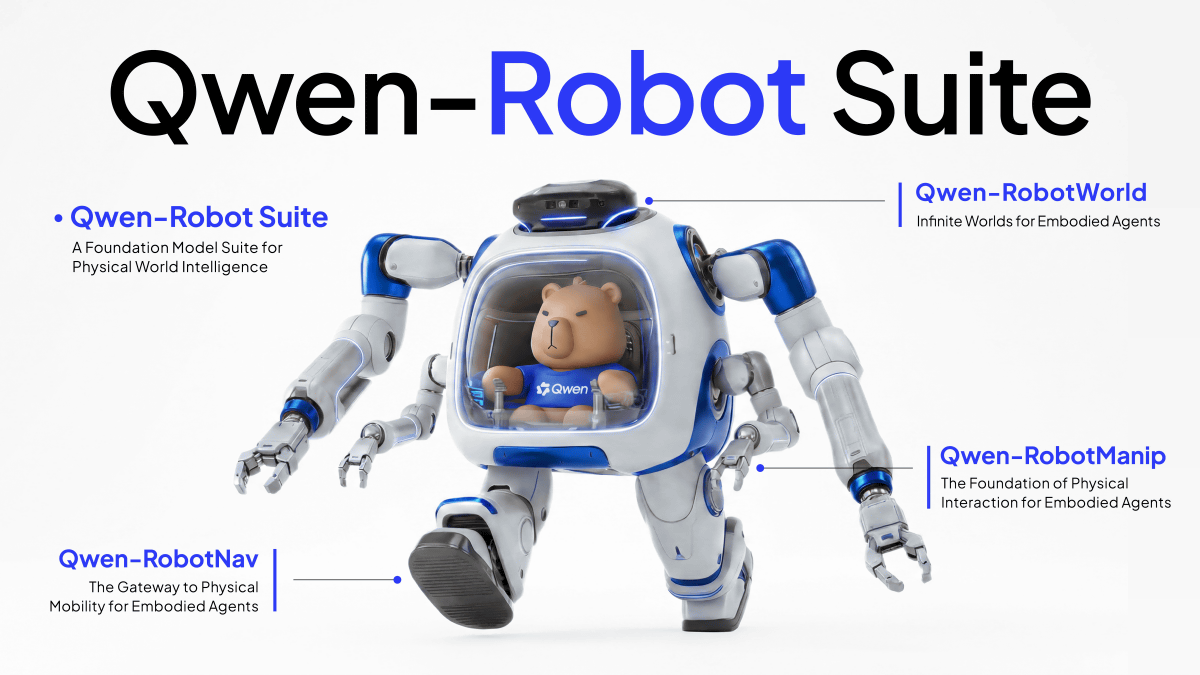
Alibabaがロボットの自動操作を可能にするAIモデル群「Qwen-Robot Suite」を発表しました。

元Google CEOが支援するスタートアップが、LGと共同でAI搭載の産業用ロボットを発表しました。

ugoがデータセンターの見回り業務を自動化する小型点検ロボット「ugo mini」を発表しました。

アカツキAIテクノロジーズが企業のロボット導入を支援する「フィジカルAIソリューション」の提供を開始し…

視覚言語モデル(VLM)を活用し、ロボットが人間の感情を顔の表情だけでなく文脈も考慮して認識する研究が…
ジェフ・ベゾス氏が物理AI分野の新スタートアップ「プロメテウス」を設立しました。
韓国のロボットスタートアップRLRWLDが、Nvidiaと提携し、ロボットの器用さを評価する普遍的なベンチマー…
中国のロボット企業Unitree Roboticsが、人型ロボットの普及戦略と日本市場開拓について語りました。

中国のヒューマノイドロボットメーカーEngineAIが香港での新規株式公開(IPO)を秘密裏に申請した模様です…