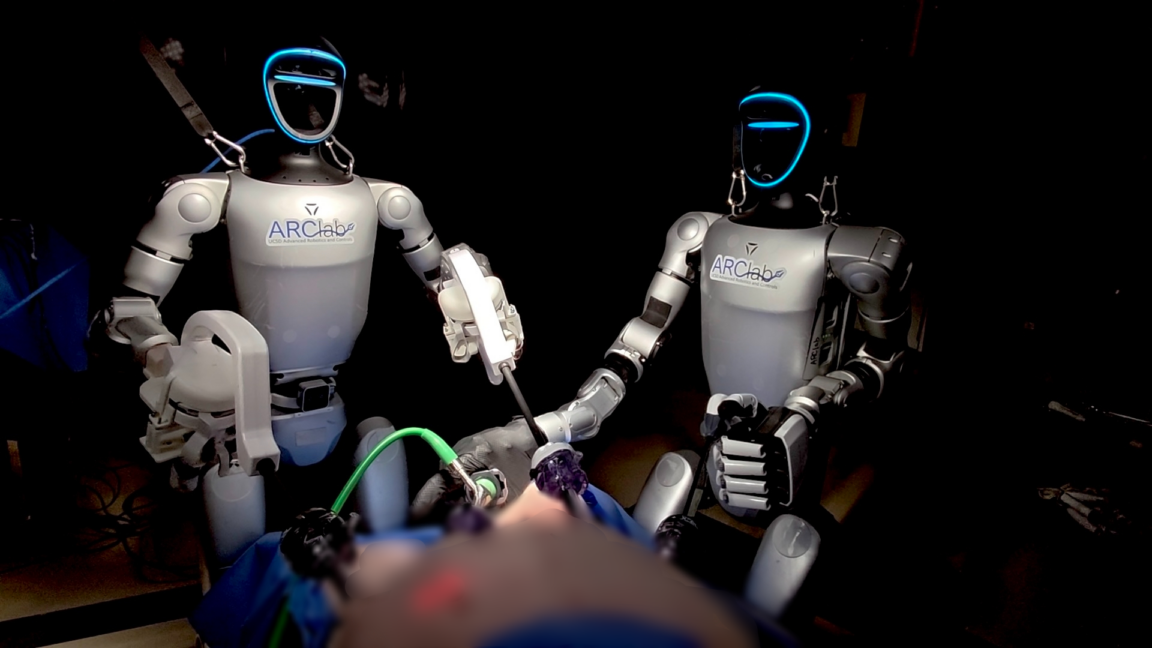
外科医が操作する人型ロボットが世界初の生体ブタ手術を実施
外科医が遠隔操作する人型ロボットが、生きたブタに対する世界初の手術を成功させました。
AI&Tech、もう追いかけなくていい。
30秒で読めるニュースダイジェスト
外科医が遠隔操作する人型ロボットが、生きたブタに対する世界初の手術を成功させました。

自動化展示会「Automate Show」で、ロボットの普及にはまだ長い道のりがあることが示されました。
三菱自動車が東大発スタートアップと協業し、国産人型ロボットの量産体制を2027年までに構築します。

モベンシスがフィジカルAI搭載ロボットによるモノポリー実演とROS 2向けソフトモーションコントローラーを…

General Intuitionが、ビデオゲームデータで物理AIの基盤モデルを訓練し、ロボット開発を加速させます。

Mistralが単一のRGBカメラだけでロボットを操縦する8Bモデル「Robostral Navigate」を発表しました。

Mistral AIが、物理AI分野への進出を強化するため、新たなロボットナビゲーションモデルを発表しました。

AIの進化により、自律型ロボットが職場や家庭で労働者として機能する可能性が示唆されています。
AIの進化により、自律型ロボットが職場や家庭で労働者として機能する可能性が示唆されています。

米国製自律型地上車両がウクライナ紛争で初めて実戦投入されました。
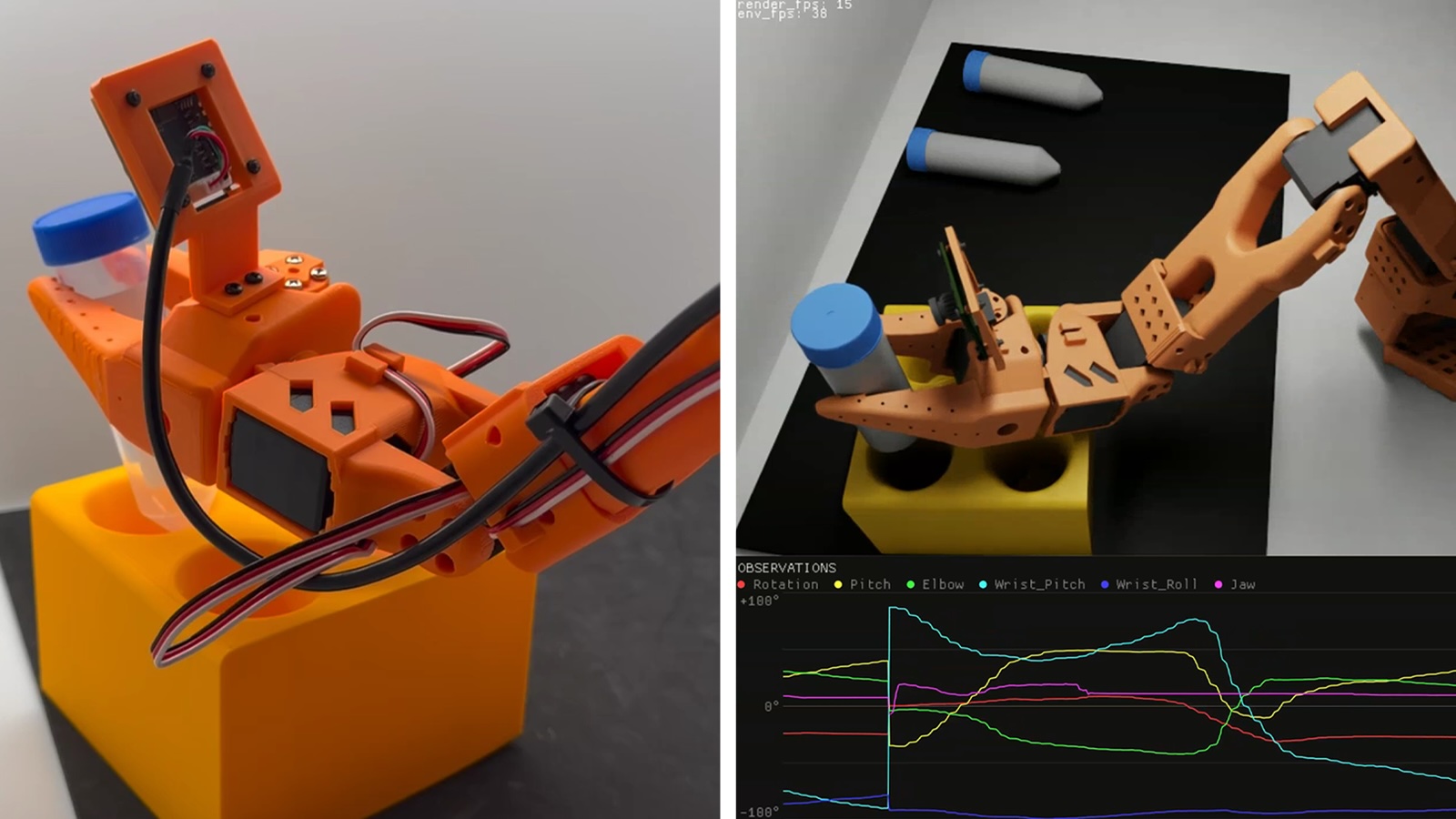
NVIDIAとHugging Faceが、オープンソースロボット開発フレームワークLeRobotに新しいモデルとフレームワー…

Hugging Faceがロボット学習ライブラリLeRobotのバージョン0.6.0をリリースしました。